L’Hexapod STEMI est un robot en kit à assembler soi-même disposant d’une interface Bluetooth pour pouvoir le contrôler via smartphone (iOS et Android).
Ce robot est conçu pour l’éducation et permet l’enseignement de la programmation, de la modélisation 3D et de la conception d’application Android (la création d’application iOS n’est pas encore disponible).
La carte de contrôle de l’Hexapod est basée sur un microcontrôleur ESP32 compatible avec l’IDE Arduino pour les utilisateurs avancés (compatible Due).
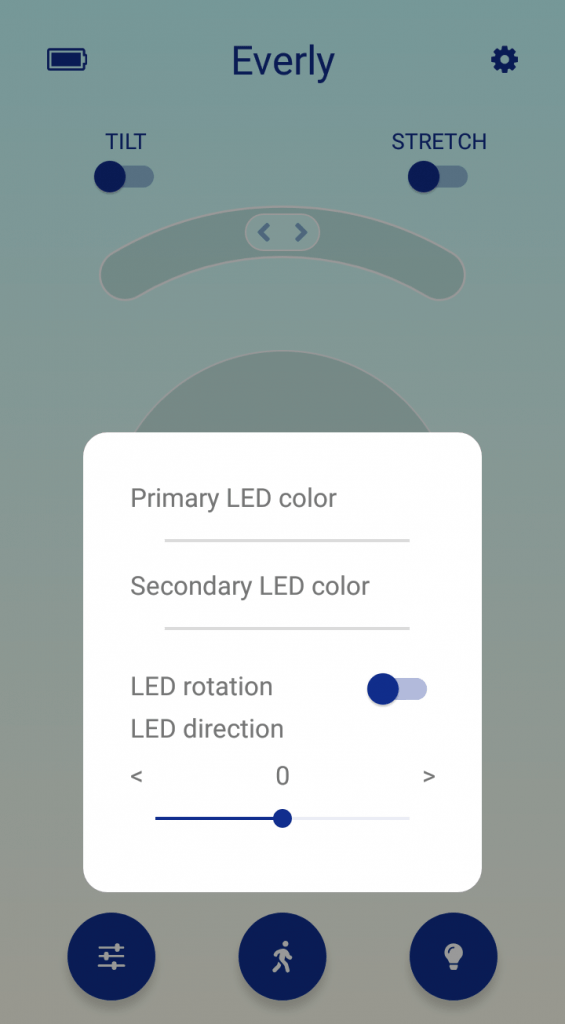
Le robot dispose également de 6 LEDs RVB, de 3 capteurs tactiles, de plusieurs interfaces pour le raccordement de capteurs, de servos et de modules compatibles.
Le guide d’assemblage et les différentes leçons sont disponibles de façon détaillée avec plusieurs vidéos, illustrations et textes explicatifs. Malgré l’anglais, ces nombreuses ressources permettent une utilisation simplifiée même pour les plus néophytes en robotique et en programmation.
Pour accéder à toutes ces ressources (et suivre la suite de cet article), inscrivez-vous sur le site de STEMI.
Le servomoteur est un moteur permettant de tourner sur une course limitée (180°).
Il se pilote par des largeurs d’impulsions.
La plage 0° – 180° se traduit alors par 1000µs – 2000µs.
Le montage du robot est demandera une certaine attention et du soin. Bien qu’il soit relativement simple, il est aussi facile de se tromper. La rubrique « Robot assembly » explique étape par étape comment assembler les pièces.
Voici quelques éléments afin que le montage se passe au mieux :
NB : le robot n’est pas conçu pour être monter-démonter plusieurs fois !
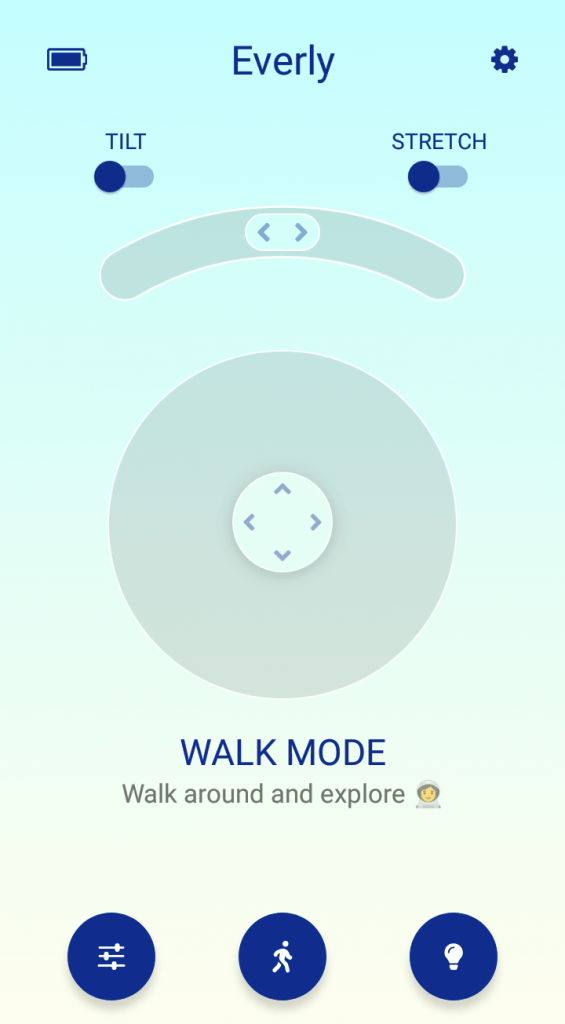
Comme indiqué dans la présentation, le robot STEMI est contrôlable sur smartphone iOS et Android via Bluetooth.
Activez votre Bluetooth et téléchargez l’application sur l’Apple Store [wp-svg-icons icon= »apple » wrap= »i »] (iOS 9.0 et plus) ou sur le Play Store [wp-svg-icons icon= »android » wrap= »i »] (Android 4.4 et plus) en fonction de votre appareil.
Mettez en marche le robot et lancez l’application sur votre smartphone. Les LEDs du robot deviennent fixes lorsque la connexion Bluetooth est établie. Pour certains smartphones, un appairage manuel du Bluetooth est nécessaire.
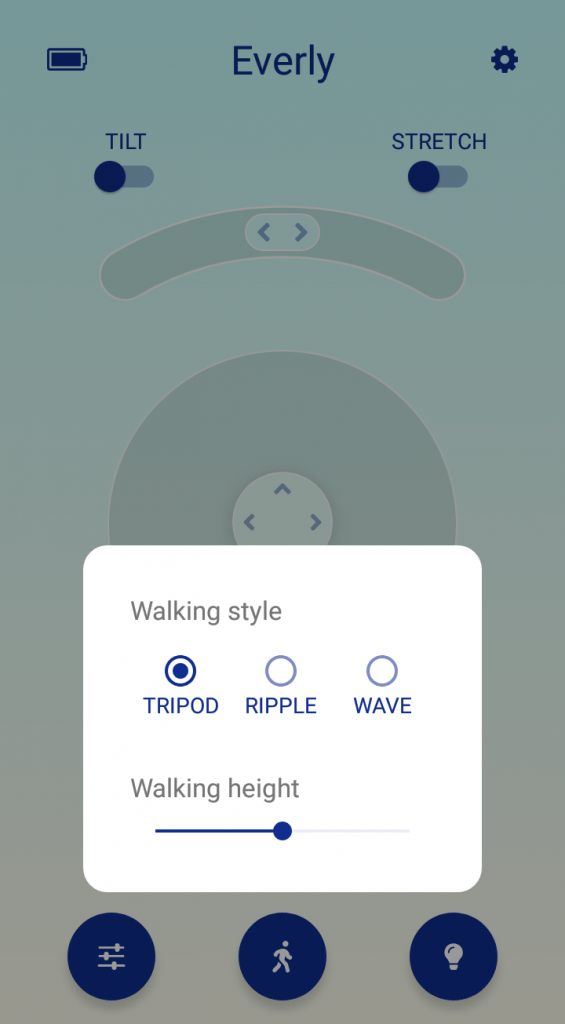
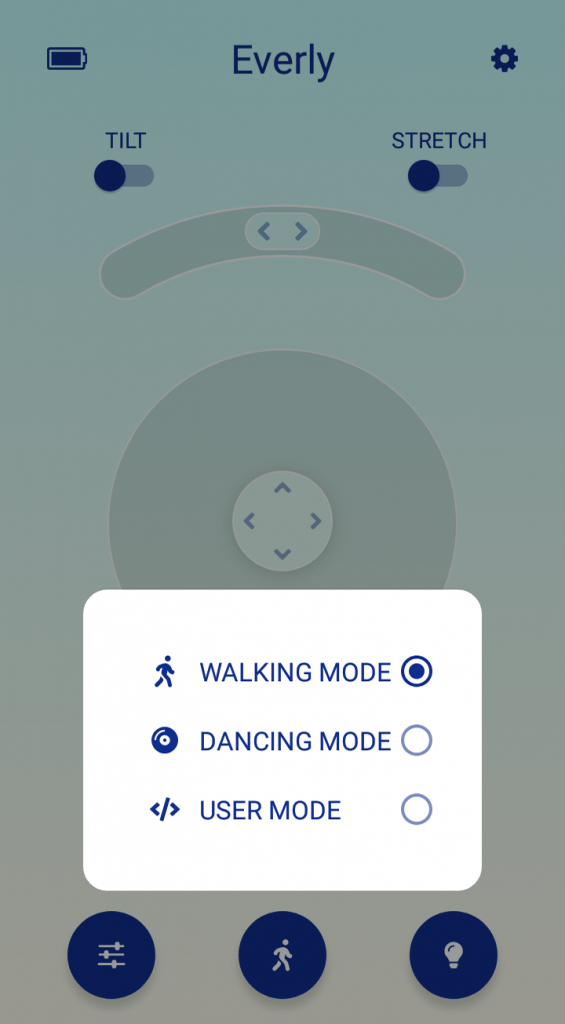
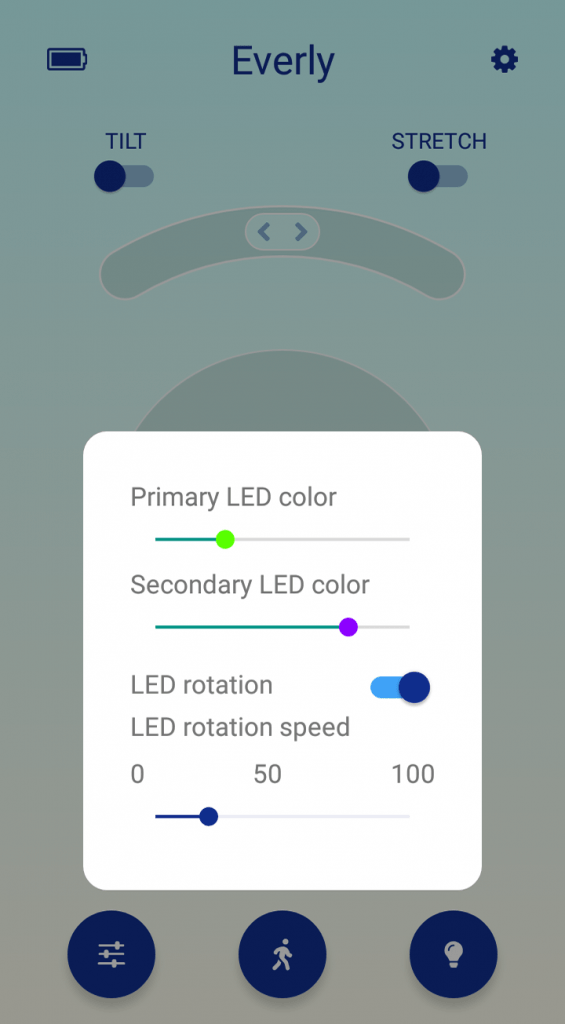
Vous pouvez alors naviguer dans l’application pour contrôler le robot.
Le tutoriel “3D Modeling” vous permettra
de prendre la main avec le logiciel Fusion 360.
Il s’agit d’un logiciel de modélisation 3D
relativement simple comparable à Solid Works.
L’équipe de STEMI vous propose de recréer, pièce par pièce,
l’Hexapod en 3D via ce logiciel.
Cela peut s’avérer intéressant si vous possédez une imprimante 3D
afin de personnaliser certaines pièces.
Pourquoi ne pas avoir votre propre application avec les commandes de votre choix ?
Si vous êtes un utilisateur Android, rendez-vous dans la partie “MIT App Inventor“.
Vous y trouverez un tutoriel complet pour prendre en main cet éditeur en ligne (requiert un compte Google) et programmer votre application.
Le logiciel ressemble à Android Studio et a l’avantage de ne pas nécessiter d’énormes connaissances en programmation : la programmation s’effectue en blocs à la place du Java traditionnel.
Vous voulez que votre robot suive une séquence d’instructions de façon automatique ? Programmez-le avec Arduino !
Dans la catégorie “Arduino and electronics“, vous trouverez toutes les instructions pour que votre logiciel Arduino puisse programmer le robot, ainsi que des exemples de code.
Vous pouvez retrouver la liste de toutes
les commandes sur le GitHub [wp-svg-icons icon= »github-3″ wrap= »i »] de STEMI.
Pour revenir à l’état initial du robot, téléversez le programme “Default” qui se trouve dans : Fichier >> Exemples >> Stemi Hexapod.
Pour aller plus loin, l’équipe STEMI vous propose de créer une application Android capable d’utiliser la commande vocale pour piloter le robot.
Si le projet vous intéresse, suivez les 13 vidéos (en anglais) sur la chaîne YouTube [wp-svg-icons icon= »youtube » wrap= »i »] de STEMI :
Date de dernière modification 6 septembre 2021 11 h 21 min
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}