


Contrôle d’un bras robotique Joy-It
Aujourd’hui, nous allons contrôler un bras robotique grâce à une carte Arduino et à une manette.
|
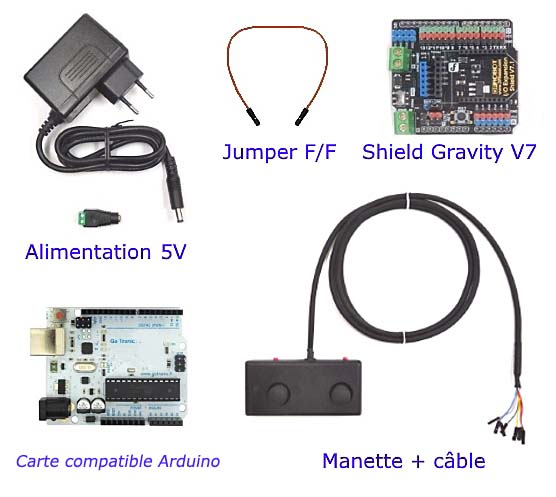
Matériel pour la réalisation :
|
 |
 |
Montage des éléments
Pour construire le robot, aidez-vous du guide de montage. Nous vous conseillons d’utiliser des écrous indesserrables.
Pour monter la manette, veuillez vous référer au mode d’emploi.
Insérez le Shield Gravity sur la carte Arduino Uno.
Étape 1, reliez le VCC Analogique et le VCC Digital entre eux avec le Jumper F/F. Ce raccordement est indispensable pour que tout le Shield soit correctement alimenté !
Nous allons concevoir un programme permettant au robot de pouvoir suivre une ligne noire tracée sur un circuit au fond blanc. À chaque fois que le robot détectera qu’il s’éloigne ou qu’il n’est plus sur la ligne noire, il bougera de façon à retrouver la ligne noire. Exemple, s’il s’éloigne à gauche de la ligne, il reviendra automatiquement à droite.
|
Étape 2, raccordez la manette au Shield Gravity de la façon suivante :
|
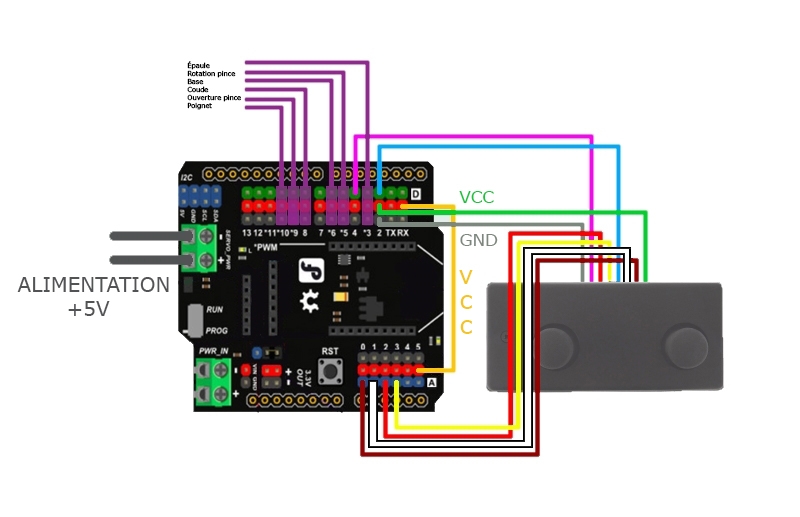 |
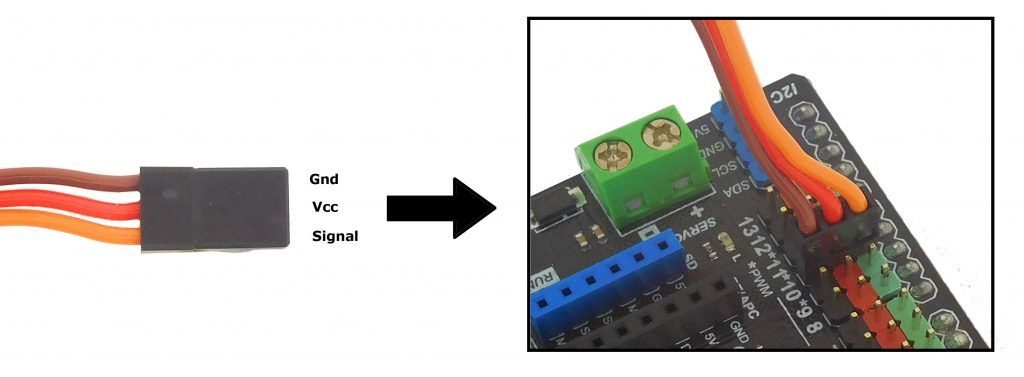
| Étape 3, nous allons relier les moteurs du bras robotique au Shield Gravity. Chaque moteur est composé de 3 fils : un GND (marron), un VCC (rouge), et une sortie numérique (orange). Il faudra donc relier de la manière suivante : |
 |
|
Raccordez :
|
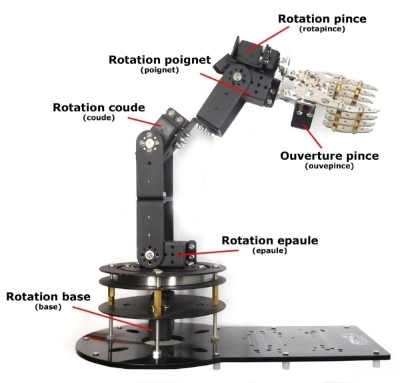 |
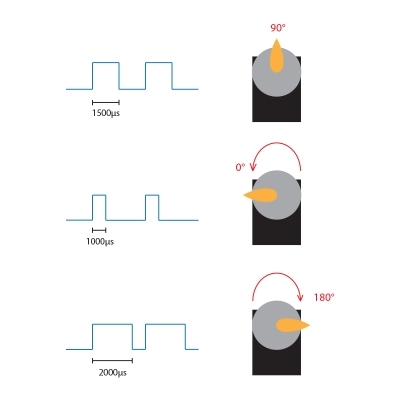
Fonctionnement des servomoteurs :Le servomoteur est un moteur permettant de tourner sur une course limitée (180°). |
 |
Programme Arduino
|
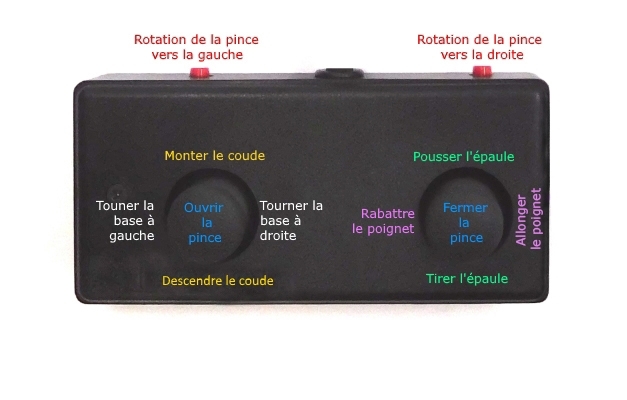
Nous allons éditer un programme permettant de contrôler les différent moteurs du robot grâce à la manette :
|
 |
#include <Servo.h>
Servo base; Servo epaule; Servo coude; Servo poignet; Servo rotapince; Servo ouvepince;
int J1, J2, J3, J4;
int BP1, BP2;
int pulse1, pulse2, pulse3, pulse4, pulse5, pulse6;
int pas1, pas2, pas3, pas4;
void setup() {
base.attach(6); //sortie numérique 6
epaule.attach(3); //sortie numérique 3
coude.attach(9); //sortie numérique 9
poignet.attach(5); //sortie numérique 5
rotapince.attach(11); //sortie numérique 11
ouvepince.attach(10); //sortie numérique 10
pinMode(4, INPUT_PULLUP); //sortie numérique 4
pinMode(2, INPUT_PULLUP); //sortie numérique 2
//utilise le VCC et la résistance de pullup de l’Arduino >> évite de rajouter un VCC et une résistance dans le montage
J1 = J2 = J3 = J4 = 0;
BP1 = BP2 = 1;
//initialisation des moteurs en position de départ
pulse1 = pulse2 = pulse3 = pulse4 = pulse5 = 1500; //90°
pulse6 = 2000; //180°
}
void loop() {
J1 = analogRead(A2); J3 = analogRead(A0); //Joystick gauche mouvement horizontal et vertical
J2 = analogRead(A3); J4 = analogRead(A1); //Joystick droit mouvement vertical et horizontal
BP1 = digitalRead(4); BP2 = digitalRead(2); //Bouton poussoir gauche et droit
base.writeMicroseconds(pulse1);
epaule.writeMicroseconds(pulse2);
coude.writeMicroseconds(pulse3);
poignet.writeMicroseconds(pulse4);
rotapince.writeMicroseconds(pulse5);
ouvepince.writeMicroseconds(pulse6);
//lecture J1
if (J1 > 1000) {
pulse6 -= 10; //action sur la fermeture de la pince
if (pulse6 < 1650) {
pulse6 = 1650; /*[2]*/
}
}
else
{ //action sur la base
pas1 = map(J1, 200, 800, -10, 10); //[0]
if (pas1 < 5 && pas1 > -5) {} //[1]
else
{
pulse1 += pas1;
if (pulse1 > 2200) {
pulse1 = 2200; //[2]
}
if (pulse1 < 800) {
pulse1 = 800; //[3]
}
}
}
//lecture J2 et action sur le coude
pas3 = map(J2, 100, 900, -10, 10);
if (pas3 < 5 && pas3 > -5) {} //[1]
else
{
pulse3 += pas3;
if (pulse3 > 2100) {
pulse3 = 2100; //[2]
}
if (pulse3 < 900) {
pulse3 = 900; //[3]
}
}
//lecture J3 et action sur l’épaule
if (J3 > 1000) {
pulse6 += 10; //action sur la l’ouverture de la pince
if (pulse6 > 2400) {
pulse6 = 2400; /*[3]*/
}
}
else
{
pas2 = map(J3, 200, 800, -10, 10);
if (pas2 < 5 && pas2 > -5) {} //[1]
else
{
pulse2 -= pas2;
if (pulse2 > 2200) {
pulse2 = 2200; //[2]
}
if (pulse2 < 1000) {
pulse2 = 1000; //[3]
}
}
}
//lecture J4 et action sur le poignet
pas4 = map(J4, 100, 900, -10, 10);
if (pas4 < 5 && pas4 > -5) {} //[1]
else
{
pulse4 -= pas4;
if (pulse4 > 2100) {
pulse4 = 2100; //[2]
}
if (pulse4 < 900) {
pulse4 = 900; //[3]
}
}
//lecture BP1 et BP2, et action sur la rotation de la pince
if (BP1 == LOW) {
pulse5 -= 10;
if (pulse5 < 600) {
pulse5 = 600; /*[2]*/
}
}
if (BP2 == LOW) {
pulse5 += 10;
if (pulse5 > 2100) {
pulse5 = 2100; /*[3]*/
}
}
delay(15);
}
/* [0] Un joystick peut varier de 0 à 1023. Suivant la plage qui nous intéresse
l’instruction “map()” va permettre de faire une mise à l’échelle
[1] offset
[2] borne minimale : début de course
[3] borne maximale : fin de course */
|
Mise en marche
Une fois le programme téléversé, retirez le câble USB de l’Arduino.
Câblez le bloc d’alimentation 5 V au Shield Gravity et branchez la prise au secteur.
Tout est prêt !






Commentaires d'article
Laissez un commentaire