


Histoire de la robotique
|
Quand est apparu le premier robot ? Quelles ont été les grandes étapes de l’histoire de la robotique ? Voici quelques éléments de réponse dans cette chronologie rassemblant quelques-uns de ces événements. Bien sûr la liste n’est pas exhaustive et de nombreuses autres merveilles de technologie mériteraient d’être mentionnées. En particulier, de très nombreux robots ont été développés ces dernières années et il était bien sûr impossible de tous les mentionner ! Les périodes décrites dans cette chronologie ne sont pas aussi nettement définies, et certaines peuvent s’étendre sur de bien plus grandes périodes. |
Les premiers mécanismes
Apparue vers 3500 av. J-C. la roue est considérée comme le premier ouvrage technique significatif de l’histoire de l’humanité, que ce soit pour les tours de potiers ou pour le transport.
 |
 |
|
2600 av. J-C Roue Sumérienne |
1000 av. J-C Roue de l’âge du Fer Source des images Wikimedia Commons. |
L’horlogerie
|
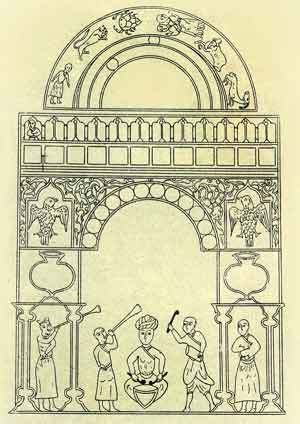
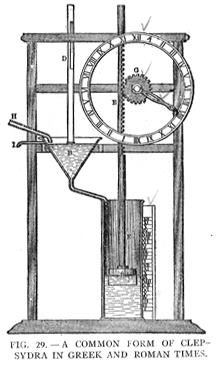
Planche d’horloger de Louis Moinet issue de son Traité de l’horlogerie 1806 Source : www.louismoinet.com Les clepsydres (horloges à eau) furent probablement inventées vers 1600 av. J-C. en Egypte. De simples bols percés dont l’écoulement régulier permettait une mesure rudimentaire du temps, elles furent perfectionnées en Grèce quelques siècles avant Jésus Christ, avant de constituer de véritables automates sophistiqués sous les civilisations chinoises et arabes du premier millénaire. |
 |
 |
|
an 1100 Clepsydre d’Al-Jazari Source : « histoire des automates arabes » |
an 1090 Clepsydre Gréco-Romaine Source : « histoire de la clepsydre » |
L’horlogerie est aussi le berceau des premiers automates dont nous avons la trace, le plus ancien conservé étant le coq automate des Trois Rois de l’horloge astronomique de la cathédrale Notre-Dame de Strasbourg.
 |
 |
|
1354 Coq automate des trois rois Source : Wikimedia Commons (photo de Ji-Elle) |
1383 Automate Jacquemart de l’église Notre-Dame de Dijon Source : Wikimedia Commons (photo de Christophe Finot) |
Les automates
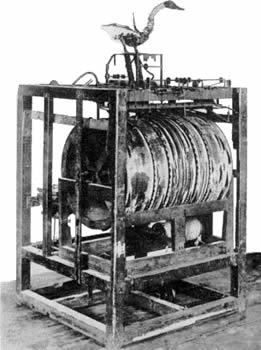
Un des automates les plus surprenants est certainement le canard digérateur de Jacques de Vaucanson (1738). Capable de boire, manger, cancaner et digérer comme un véritable animal, il fut malheureusement détruit dans un incendie au milieu du XIXème siècle et il n’en reste que des photographies (source Wikimedia commons).
 |
 |
|
1738 Canard digérateur de Vaucanson Source : Wikimedia Commons |
« Anas Mechanica Arcana » canard automate, création 1998 de l’Automatier-Cinéticien Frédéric Vidoni. Source et détails : fredericvidoni.com |
L’automate d’Henri Maillardet (1826) inspira Brian Selznick, auteur du roman pour enfants « L’invention de Hugo Cabret » adapté au cinéma dans le film d’animation de Martin Scorcese.
Source de l’image, et histoire de cet automate sur le site du Franklin institute (en anglais).
 |
 |
|
1774 Le dessinateur, la musicienne et l’écrivain de Jaquet-Droz Source : Wikimedia Commons |
1800 Automate dessinateur et écrivain de Maillardet |
La cybernétique
Les automates autorégulés forment la base de la cybernétique. Ici les automates ne se contentent pas d’effectuer des mouvements préprogrammés, mais interagissent avec leur environnement, qui les gouverne. Quelques exemples :
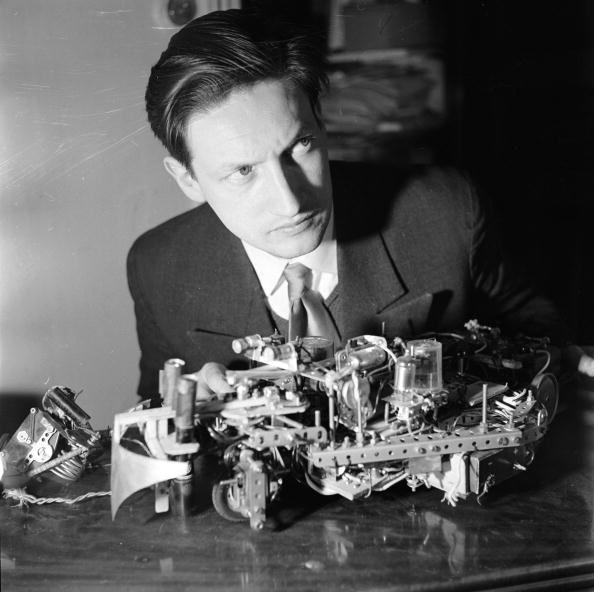
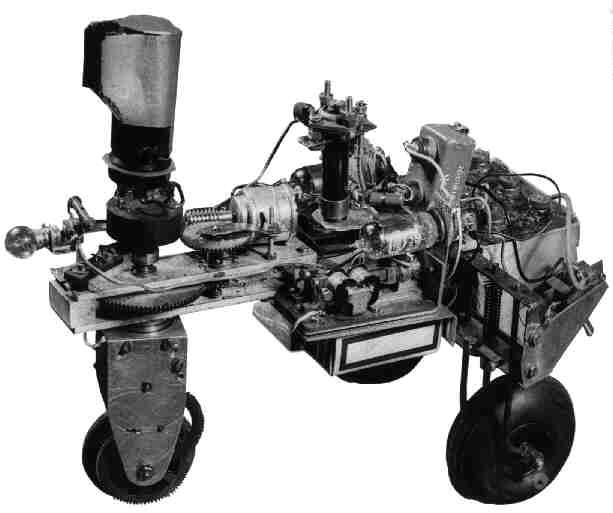
Le chien électrique de Hammond et Miessner (1915) se guide à la lumière, tout comme Philidog, le chien de Henri Piraux (1928) et le renard de Ducrocq (1953).
Source des images : le zoo cybernétique (en anglais)
 |
 |
|
1915 Le chien électrique de Hammond et Missner
|
1928 Philidog Source : Wikimedia Commons |
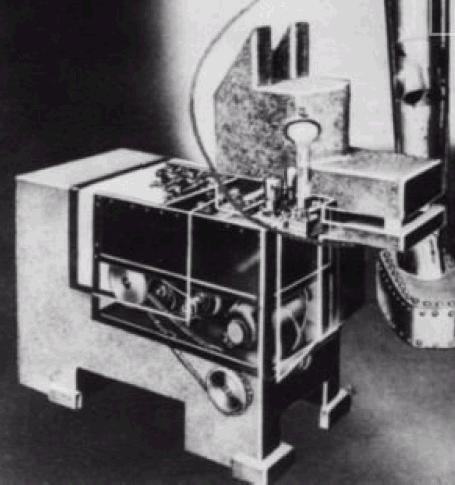
La tortue cybernétique de W. Grey Walter (1950) était équipée de capteurs tactiles et lumineux lui permettant d’explorer son environnement (source)
 |
 |
|
1953 Le renard de Ducrocq |
1950 La tortue cybernétique de Walter |
L’intelligence artificielle
Dans la droite ligne de la cybernétique, l’objectif de rendre les machines intelligentes a mené Alan Turing à définir en 1950 une méthode afin de tester la présence d’une conscience ou d’une intelligence au sein d’une machine. C’est le test de Turing, discuté de nos jours, mais certainement fondateur dans le domaine de l’intelligence artificielle, tout comme les travaux de John McCarthy qui définit le terme d’ « intelligence artificielle » (1956).
En 1963, le programme « General Problem Solver » préfigure l’apparition des systèmes experts tels que Dendral (1965), programmes ou outils capables de reproduire les capacités d’analyse et de raisonnement de spécialistes : démonstrations mathématiques, diagnostics, etc.
En 1970, le programme SHRDLU pouvait discuter et raisonner sur les éléments d’un monde prédéfini, contenant des cubes et des pyramides. L’environnement très simple de ce programme donna de faux espoirs quand à la faisabilité d’un programme intelligent dans des situations plus complexes de la réalité.
 |
Les rovers
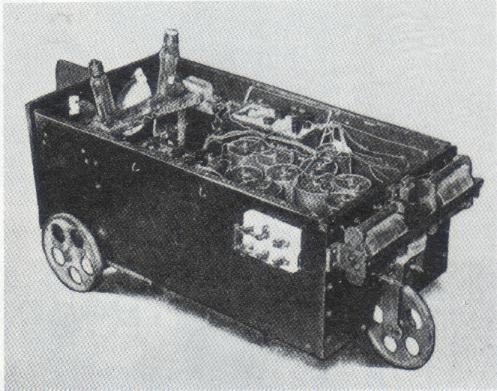
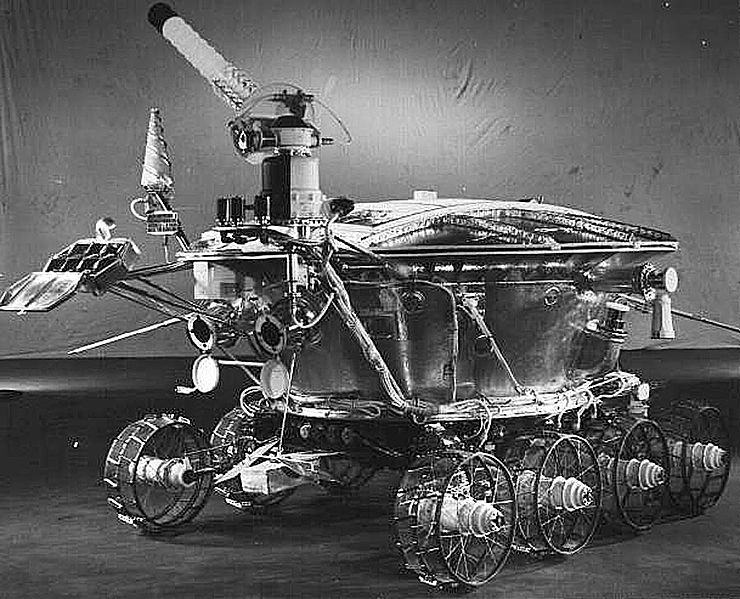
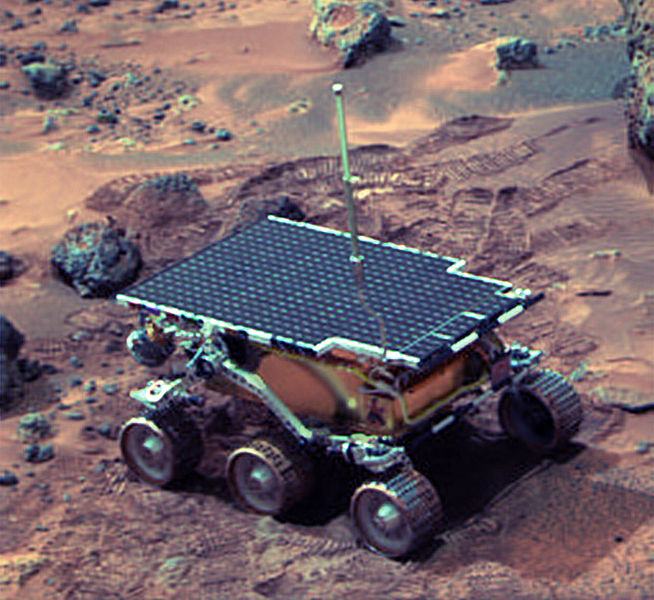
Véhicules destinés à explorer la surface de planètes de façon quasiment autonome, effectuer des mesures et prélever des échantillons, les rovers (ou astromobiles) furent développés par les russes dès les années 1960, tel le Lunokhod 1.
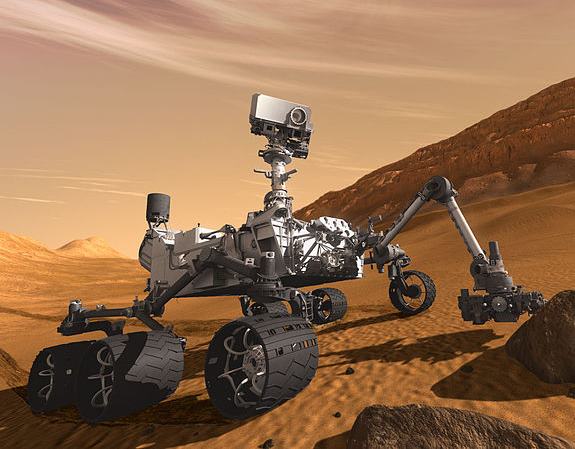
La Nasa développa aussi des rovers à partir de 1970 dans le cadre du programme Apollo. Sojourner explora la planète Mars en 1997 et Curiosity en 2012.
Source des images : NASA. Schema NASA/JPL-Caltech
 |
 |
 |
|
1970 Lunokhod |
1996 Sojourner |
2011 Curiosity rover |
Les animats
Animaux artificiels, ils sont l’objet d’une branche particulière de la cybernétique dont l’objectif est de copier les mécanismes du vivant. Si le terme animat ne fut définit qu’en 1985 par S.W. Wilson, en revanche les machines inspirées du vivant ont de tous temps stimulé les artistes et savants.
On attribue par exemple à Archytas de Tarente (IVème siècle av. J-C.) ce qui est considéré comme le premier animat de l’histoire de l’humanité, bien avant les premières horloges et automates dont nous avons des traces physiques : un pigeon de bois capable de voler, propulsé par de la vapeur. Aucun vestige, aucune photo ou représentation fidèle de ce mécanisme n’existe toutefois.
 |
|
2010 Réplique du lion de Leonard de Vinci |
Léonard de Vinci aurait aussi construit un automate de lion, présenté à la cour de François Ier en 1515. Une réplique à été reconstituée en 2010 à partir de bribes d’informations (source Wikimedia Commons).
Le canard de Vaucanson en est certainement un autre exemple. Bien plus récemment (1990-2001), on peut mentionner Brachiator, un robot reproduisant la brachiation du Gibbon se déplaçant de branche en branche.
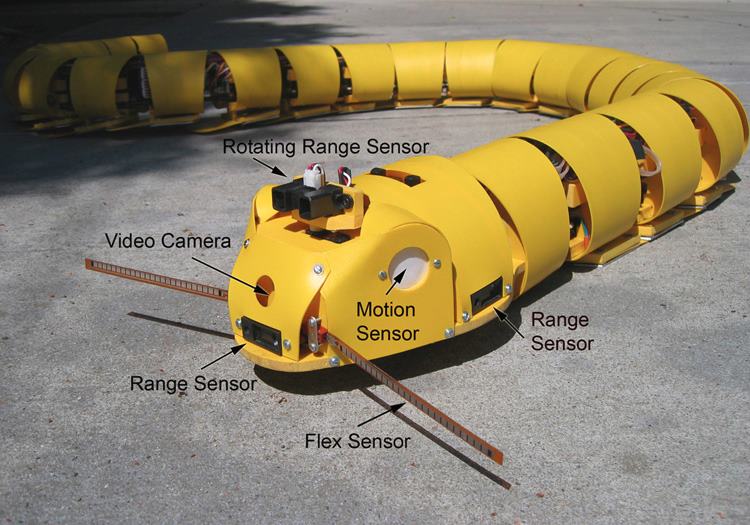
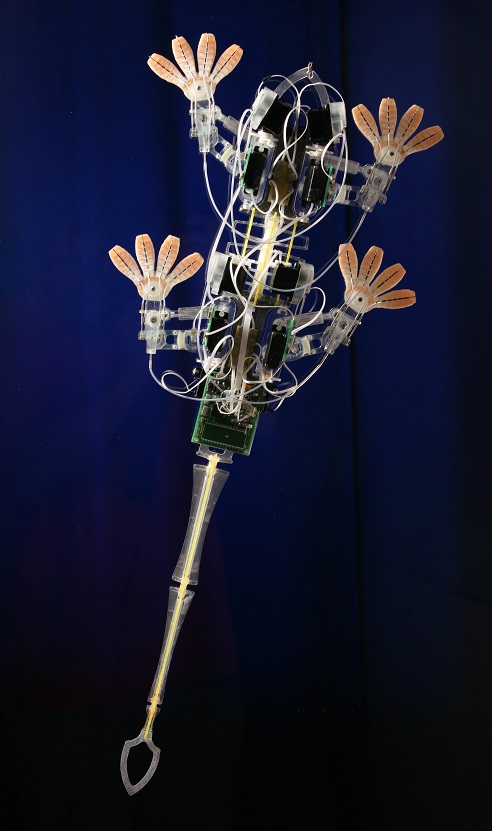
Le robot serpent de Miller (1994-2005 site officiel) et le robot-gecko Stickybot capable de grimper aux vitres (2006) sont d’autres exemples d’animats. Beaucoup d’autres ont été développés depuis, comme les quadrupèdes Spot et Spotmini (en vidéo) de Boston Dynamics (société rachetée par Google en 2013).
 |
 |
|
1994 Serpent de Miller |
2006 Stickybot, Mark Cutkosky, Stanford University |
Les humanoïdes
|
Source de l’image : wallpaperswide.com Le premier robot humanoïde est probablement du à Léonard De Vinci, qui présenta en 1495 un chevalier en armure capable de s’asseoir, relever sa visière et bouger ses bras. Après avoir découvert ses notes et schémas en 1950, une réplique fonctionnelle fut construite et exposée au musée de Berlin : |
 |
|
Reproduction du chevalier de Leonard de Vinci Wikipedia Commons |
La maîtrise de la bipédie est certainement l’accomplissement le plus technique de l’histoire des robots humanoïdes. WABOT-1 de l’université de Waseda (1973) est l’un des premiers robots humains capables de se déplacer (de façon rudimentaire). Suivirent WHL-11 de Hitachi (1985), les premiers robots de Honda E0 à E6 (1986-1993) et P1 à P3 capable de marcher comme un humain et de monter des escaliers (1992-1997).
 |
|
2000 Asimo de Honda |
Le onzième robot développé par Honda, Asimo, est capable de courir (2000). La dernière version de 2011 peut sautiller sur un pied, courir à 9km/h, manipuler des objets délicatement comme remplir un gobelet, communiquer en langage des signes, etc. A voir en vidéo
(Image issue de Wikipedia Commons)
 |
|
2003 QRIO (SDR-4X) de Sony Premier robot capable de courir |
Sony développe de petits robots humanoïdes nommés SDR pour Sony Dream Robot, tel que SDR-3X. Ils seront renommés QRIO en 2003.
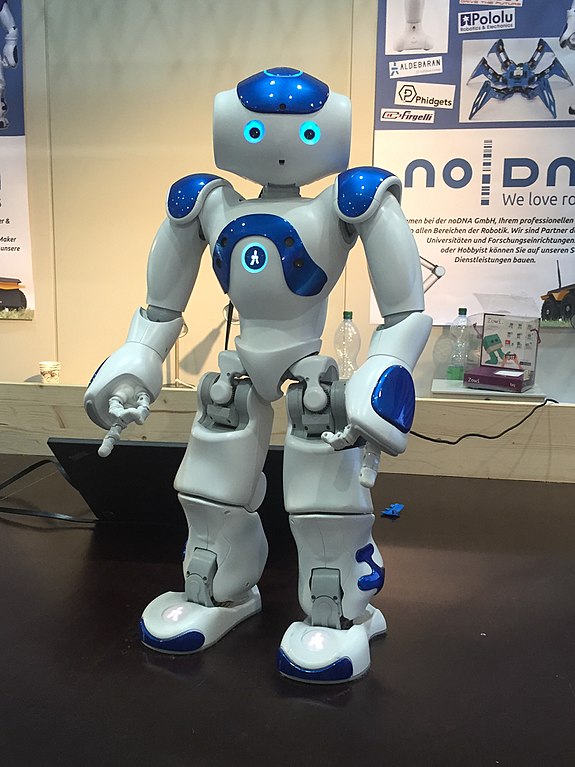
Développé en 2005-2006, Nao est un petit robot humanoïde de la société française Aldebaran Robotics. Il est autonome, programmable et forme une plateforme pédagogique idéale pour la recherche et l’enseignement. Une version « Next Gen » améliorée a été lancée fin 2011. Photo : Wikimedia Commons
 |
 |
|
2006 Nao (Aldebaran Robotics) |
2006 iCub |
iCub est un petit robot humanoïde développé en 2006 conjointement par plusieurs universités européennes. Ses spécifications et logiciels sont accessibles en open-source.
A voir en vidéo sur la chaîne Youtube de l’iCub
Des robots humaoïdes sont aussi développés pour l’assistance à la personne, comme Twendy one (2007) ou encore Roméo d’Aldebaran robotics (2012 source image)
 |
|
2012 Romeo |
Kobian de l’université Waseda au Japon est un robot capable de reproduire les expressions humaines (2010) source.
Enfin, certains robots ont été développés dans un souci de réalisme maximal, comme le Geminoid F (2012) de l’université d’Osaka et du laboratoire ATR de Hiroshi Ishiguro (images sur le site officiel)
Les exosquelettes
Qu’ils soient biomécaniques ou motorisés, ces squelettes externes mécaniques auraient de nombreuses applications : dans la médecine afin d’aider les personnes handicapées motrices à se déplacer, ou même dans le domaine militaire afin de rendre les soldats plus forts et endurants.
L’exosquelette biomécanique HAL (Hybrid Assisted Limb) détecte les intentions de mouvement pour les assister et permet de soulever des masses jusqu’à 10 fois plus lourdes. Il peut aider des personnes à mobilité réduite à retrouver l’usage de leurs jambes par un accompagnement dégressif.
Site officiel de Cyberdyne
L’exosquelette motorisé Rex (2010) consiste lui en de véritables jambes robotiques commandées par un Joystick et permet à une personne entièrement paralysée (paraplégie complète) de se déplacer, même si ce n’est encore qu’avec des mouvements relativement lents. Site officiel : rexbionics.com
Les robots chirurgiens
En 1983, Arthrobot (Vancouver, Canada) le premier robot utilisé lors d’une opération chirurgicale se contentait de répondre aux commandes vocales et de passer les instruments chirurgicaux.
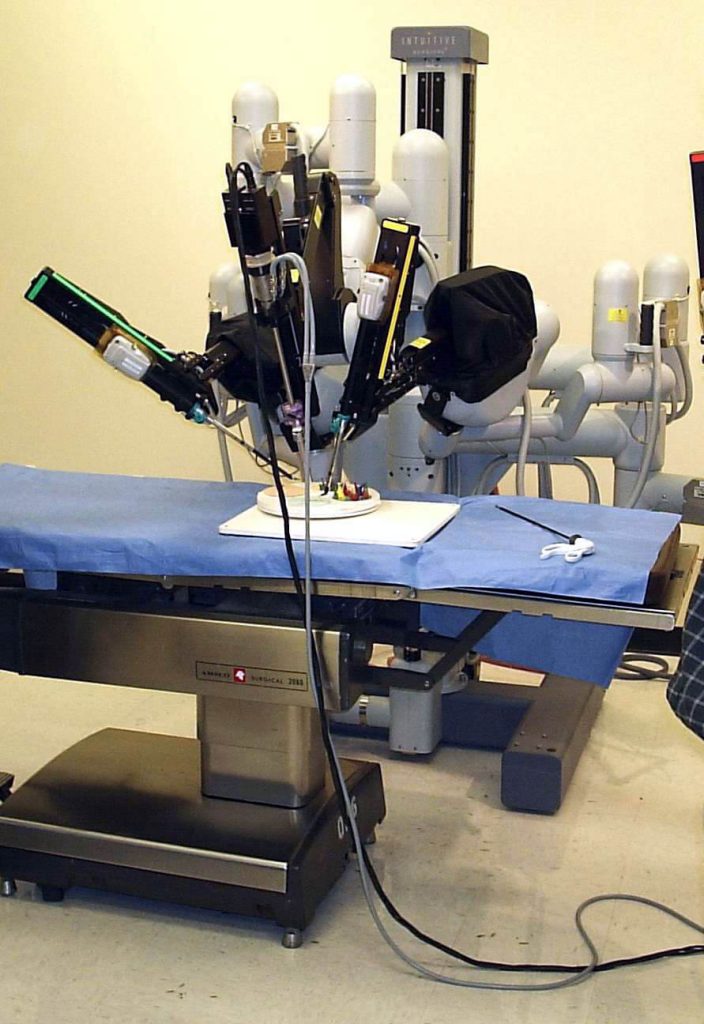
C’est en 2000, soit 17 ans plus tard, que le premier robot véritablement chirurgien, nommé Da Vinci, était autorisé par la FDA (Food and Drug Administration) à effectuer certains types d’opérations, apportant une plus grande précision, fiabilité, et des risques réduits d’infection en comparaison d’une intervention humaine. C’est un robot très onéreux, coutant la bagatelle de deux millions d’euros (pour le modèle le plus récent). Il en existe toutefois plus de 1500 dans le monde…
 |
|
2000 Da Vinci (société Intuitive Chirurgical) |
Les drones
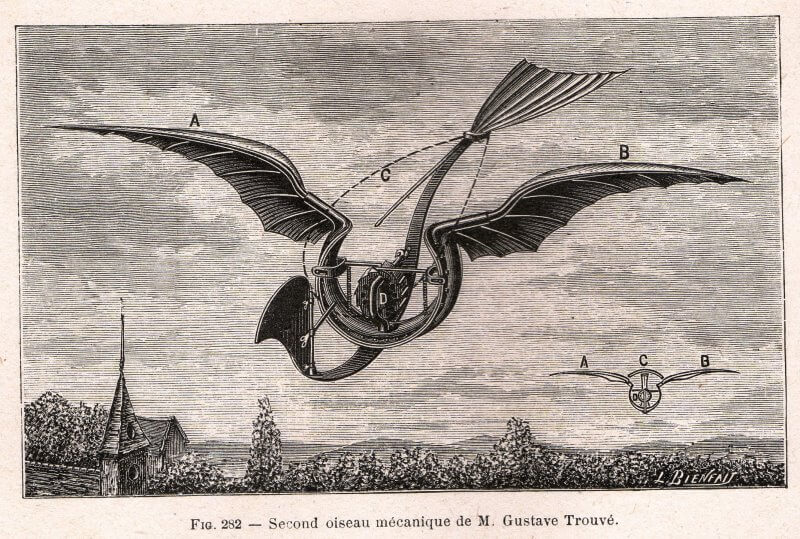
| Le premier avion « motorisé » est probablement le Planophore d’Alphonse Penaud de 1871, un avion miniature très léger dont l’hélice était actionnée par un caoutchouc enroulé autour d’un axe… En 1891, on peut citer l’oiseau mécanique (ornithoptère) de Gustave Trouvé, qui battait des ailes et pouvait parcourir 70 mètres. |
 |
 |
|
1871 Planophore d’Alphonse Penaud |
1891 Ornithoptère de Gustave Trouvé |
 |
|
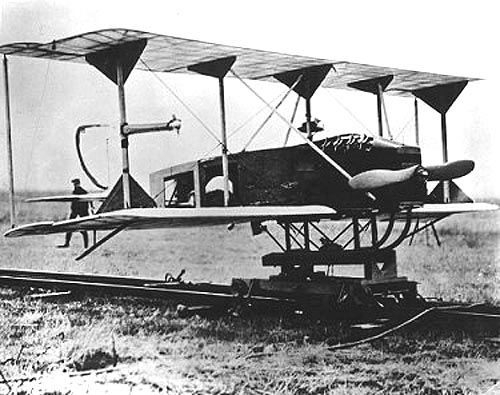
1917 Hewitt-Sperry, premier avion sans pilote |
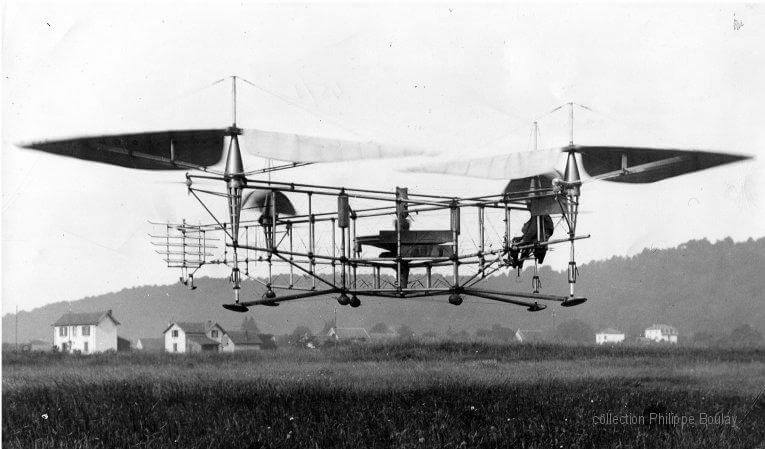
Les premiers quadricoptères datent des années 1922-1923. Ils étaient à l’époque très peu manœuvrables ! Rien à voir avec les drones devenus très populaires ces dernières années, équipés de caméras et utilisés par les journalistes, photographes, pompiers, services de sécurité, etc.
 |
 |
|
1923 Quadrirotor de George de Bothezat |
1923 Quadrirotor d’Étienne Œhmichen |
 |
 |
|
2015 Onyxstar Fox-C8 XT |
2012 Parrot AR drone 2.0 |
Il y a au final peu de différences entre un drone, un avion radio-commandé (modélisme) ou un UAV (Unmaned Aerial Vehicle – Avion sans pilote). Toutefois, les récents développements et leur popularisation permettent de distinguer les drones par :
- Leur spécialisation : les drones de combat sont de véritables armes volantes commandées à distance, les drones tactiques sont parfaits pour la surveillance, et certains peuvent même être conçus pour effectuer des tâches surprenantes comme servir des boissons à la terrasse d’un café…
- Leur réutilisation : c’est ce qui fait qu’un missile ne peut pas être qualifié de drone ou d’UAV puisqu’il est détruit au cours de son utilisation.
- Leur autonomie accrue : certains drones sont particulièrement autonomes et capables d’effectuer des ajustements en fonction de leur environnement.
- Leur « intelligence » : équipés de multiples senseurs et capables de coopération, certains drones sont beaucoup plus sophistiqués que de simples avions radio-commandés.
Le Machine learning
Serait-ce enfin l’ère de l’intelligence artificielle ?
Oui et non. Le machine learning représente un progrès énorme dans la quête de l’intelligence artificielle, mais nous sommes encore loin d’une véritable intelligence artificielle globale…
Le machine learning consiste à utiliser une base de données très grande, dans laquelle le programme va reconnaitre des correlations (c’est-à-dire des points communs), afin d’établir des règles prédictives. Par exemple, lorsque vous remplissez un recaptcha de Google, vous supervisez l’apprentissage d’un programme de reconnaissance de texte ou d’images, en indiquant à un programme « ceci est une image de chat ». Le programme dispose ainsi d’une base de donnée gigantesque de photos de chat identifiés comme tels et peut alors à l’aide de calculs parallèles massifs reconnaître les points communs de ces photos (ou de groupes d’entre elles) afin de pouvoir à l’avenir reconnaître un chat, même de dos !
 |
| Recaptcha de texte Google l’utilise pour améliorer sa technologie de reconnaissance de caractères |
 |
 |
| Recaptcha d’images Utilisé pour améliorer la reconnaissance d’images |
Et voilà le résultat ! Les serveurs de Google peuvent identifier les photos de chat, et transmettent l’information à votre smartphone sur demande. |
Mais le machine learning va plus loin que la simple reconnaissance de caractères ou même d’images… Les programmes s’adaptent à de nouvelles données et améliorent leur processus de décision de manière indépendante (c’est-à-dire sans la supervision humaine cette-fois-ci) ! Et les applications en robotique sont nombreuses :
- La vision robotique : au delà du développement des radars et autres systèmes d’imagerie professionnelle, les robots doivent apprendre à reconnaître les objets, et il devient possible de développer la vision à 360° des voitures autonomes par exemple.
- L’apprentissage des gestes : de même qu’un enfant doit apprendre la préhension des objets pour développer sa dexterité, un robot peut maintenant « apprendre » par essais-erreurs ou en copiant un humain à ramasser un objet qu’il n’est pas programmé à « prendre en main » !
- La localisation et cartographie relative : un robot peut apprendre à cartographier son environnement au fur et à mesure qu’il le découvre.
- Etc.
La liste est vouée à s’allonger considérablement !
Nous avons terminé notre voyage parmi quelques-unes des plus importantes étapes de l’histoire de la robotique, nous espérons que vous avez trouvé ces informations intéressantes.
Pour toute question relative à ces informations, vous pouvez contacter l’auteur à l’adresse johann {a.t} gotronic.fr.
Merci à Geoffroy Chaix pour son aide dans la création de cette chronologie.






Commentaires d'article
Laissez un commentaire